Sicherheitslösungen für die intelligente Mensch-Roboter-Kollaboration im Rahmen von Industrie 4.0
- Teilen
- Herausgeber
- Zoe
- Ausgabezeit
- 2024/9/18
Zusammenfassung
Im automatisierten Roboterbetrieb ist der Sicherheitsschutz entscheidend. Zu den gängigen Sicherheitseinrichtungen gehören Sicherheitszäune, Sicherheitstürschalter, Sicherheitslichtvorhänge, Sicherheitslaserscanner und Sicherheitsmatten. Dieser Artikel konzentriert sich auf den Einsatz von Sicherheitslichtvorhängen und Sicherheitslaserscannern in automatisierten Roboterarbeitsbereichen sowie auf Sicherheitslösungen in Mensch-Roboter-Kollaborationsumgebungen im Rahmen von Industrie 4.0.
Sicherheitsschutzlösungen für automatisierte Roboterarbeitsbereiche
Im automatisierten Roboterbetrieb ist der Sicherheitsschutz entscheidend. Gängige Sicherheitsvorrichtungen sind Schutzzäune, Sicherheitstürschalter, Sicherheitslichtvorhänge, Sicherheitslaserscanner und Sicherheitsmatten. Dieser Artikel konzentriert sich auf den Einsatz von Sicherheitslichtvorhängen und Sicherheitslaserscannern in automatisierten Roboterarbeitsbereichen sowie auf Sicherheitslösungen in Mensch-Roboter-Kollaborationsumgebungen im Rahmen von Industrie 4.0.
Sicherheitslösungen für die intelligente Mensch-Roboter-Kollaboration im Rahmen von Industrie 4.0
Mit der Entwicklung von Industrie 4.0 werden Roboter zunehmend eingesetzt, um Menschen bei wiederkehrenden Aufgaben zu ersetzen und so die Produktionseffizienz zu verbessern. Da sich Industrieroboter jedoch schnell bewegen und erhebliche Kräfte aufbringen, kann es zu schweren Unfällen kommen, wenn sich Mitarbeiter versehentlich ihrem Arbeitsbereich nähern. Daher ist eine strenge Sicherheitsüberwachung der Roboter und ihrer Arbeitsumgebung unerlässlich, insbesondere die Echtzeitüberwachung und -steuerung der Kraft, Geschwindigkeit und Bewegungsbahn des Roboters.
Gemäß der EU-Maschinenrichtlinie und internationalen Normen wie ISO 13849-1 müssen alle in Betrieb befindlichen Maschinen mit den erforderlichen Sicherheitsvorrichtungen ausgestattet sein. In einigen Ländern und Regionen liegt die Verantwortung für die Sicherheit bei den Anlagennutzern. Unternehmen sind daher verpflichtet, für eine sichere Arbeitsumgebung zu sorgen und sicherzustellen, dass Mitarbeiter beim Betrieb von Robotern nicht verletzt werden.
Herkömmliche Industrieroboter werden meist an festen Positionen installiert, sind sperrig und schwer zu bewegen. Mit dem technologischen Fortschritt setzen sich jedoch leichte, flexible und leicht zu bewegende Roboter der neuen Generation zunehmend auf dem Markt durch. Diese kollaborativen Roboter lassen sich problemlos in verschiedene Arbeitsbereiche bewegen, was die Nachfrage nach flexibleren und sichereren Schutzlösungen steigert.
In der Mensch-Roboter-Kollaboration der Industrie 4.0 müssen Roboter nicht nur Aufgaben präzise ausführen, sondern auch strengere Sicherheitsstandards erfüllen. Kraft, Geschwindigkeit und Bewegungsbahn des Roboters müssen jederzeit überwacht und Einschränkungen auf der Grundlage tatsächlicher Risiken vorgenommen werden. Risikobewertungen sind von entscheidender Bedeutung, da die Ergebnisse die entsprechenden Maßnahmen zur Risikominderung – wie den Einsatz von Sicherheitslichtvorhängen oder Sicherheitslaserscannern – vorgeben, um einen Sicherheitsabstand zwischen Mensch und Maschine zu gewährleisten und so die Sicherheit des Personals zu gewährleisten.
Funktionsprinzip von Sicherheitslichtvorhängen
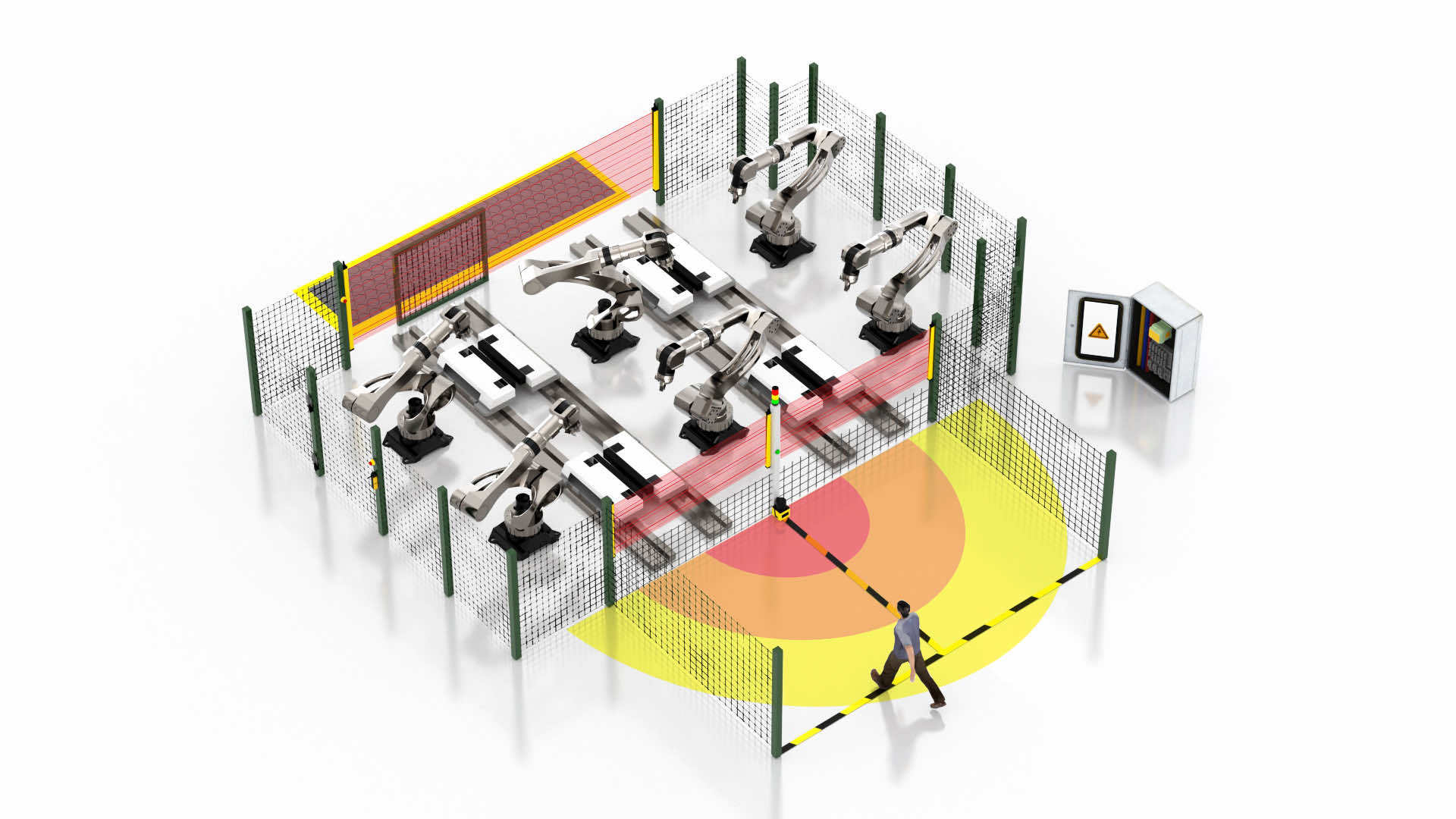
Ein Sicherheitslichtvorhang bietet Schutz, indem er eine Reihe paralleler Lichtstrahlen über den geschützten Bereich aussendet. Unterbricht eine Person oder ein Gegenstand die Strahlen, sendet die Empfängereinheit sofort ein Signal an die Maschinensteuerung, wodurch der Betrieb der Anlage gestoppt wird. Der Vorteil von Sicherheitslichtvorhängen liegt in ihrer einfachen Struktur und schnellen Reaktion, wodurch sie sich ideal für Not-Aus-Szenarien bei mechanischen Bewegungen eignen.
Funktionsprinzip von Sicherheits-Laserscannern
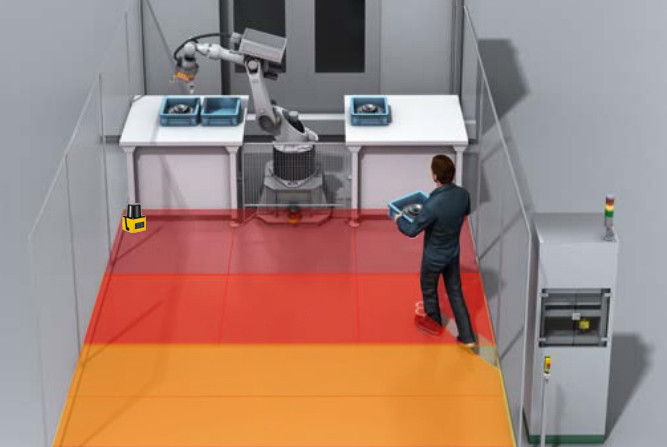
Im Gegensatz zu Sicherheitslichtvorhängen erreichen Sicherheitslaserscanner Schutz durch Abstandseinstellungen. Der Sicherheitslaserscanner arbeitet nach dem Time-of-Flight-Messprinzip (TOF) und sendet Infrarot-Laserimpulse aus, um einen Erfassungsbereich zu erzeugen. Wird ein Objekt erkannt, wird der Laserimpuls von der Objektoberfläche zurück zum Scanner reflektiert, der anhand der Zeitdifferenz zwischen Aussendung und Empfang die Objektentfernung berechnet.
Spezifischer Betriebsablauf
Am Beispiel des Sicherheits-Laserscanners von DADISICK können Anwender Erkennungszonen, einschließlich Kollaborationszonen und Warnzonen, individuell anpassen. Muss im automatisierten Betrieb Personal den Arbeitsbereich des Roboters betreten, um Objekte (die Kollaborationszone) abzulegen, zeigt das System den aktuellen Zonenstatus über die Farbe der Signalleuchten an. Gelbes Licht signalisiert, dass der Bediener die Kollaborationszone betreten hat, woraufhin der Roboter langsamer wird. Betritt der Bediener die Warnzone, leuchtet rotes Licht auf, begleitet von akustischen und optischen Alarmen. Dies signalisiert, dass der Bediener einen Gefahrenbereich betreten hat, und der Roboter stoppt vollständig. Sobald der Bediener die geschützte Zone verlässt, nehmen System und Roboter den Betrieb automatisch und ohne manuelles Eingreifen wieder auf. Dies gewährleistet Komfort und Sicherheit im Betriebsablauf.
Schlüsselkomponenten von Sicherheitsvorrichtungen und Maschinensteuerungssystemen
Das Output Signal Switching Device (OSSD) ist eine Schlüsselkomponente, die im Bereich der industriellen Automatisierungssicherheit weit verbreitet ist und in erster Linie dazu dient, effektive Verbindungen und Signalübertragung zwischen Sicherheitsgeräten und Maschinensteuerungssystemen herzustellen.
Funktionsprinzip
OSSD wird normalerweise in Verbindung mit Sensoren (wie Lichtvorhangsensoren oder Laserscannern) verwendet, um den Sensorstatus zu überwachen und festzustellen, ob Objekte oder Personen einen Gefahrenbereich betreten haben.
Wenn der Sensor einen Einbruch erkennt, sendet er ein Signal an den OSSD, der dieses Signal dann in ein für die Maschinensteuerung erkennbares Format umwandelt und an die Steuerung überträgt.
Sobald das Steuerungssystem das OSSD-Signal empfängt, führt es gemäß der voreingestellten Sicherheitslogik die entsprechenden Sicherheitsmaßnahmen aus, beispielsweise eine Notabschaltung oder eine Geschwindigkeitsreduzierung.
Anwendungsszenarien
OSSD wird häufig in verschiedenen industriellen Automatisierungsgeräten und Produktionslinien eingesetzt, insbesondere in Szenarien, in denen der Schutz des Personals erforderlich ist, wie z. B. in Roboterarbeitsbereichen, Produktionslinien für Stanzmaschinen und automatisierten Montagelinien.
In diesen Szenarien arbeitet das OSSD in Koordination mit Sicherheitsvorrichtungen wie Sicherheitslichtvorhängen, Sicherheitstürschaltern und Sicherheitsmatten und bildet ein komplettes Sicherheitsschutzsystem, das das Unfallrisiko wirksam reduziert.
2D-TOF-Sicherheitslaserscanner zur Hindernisvermeidung

Technische Daten | ||||
Funktionsprinzip | Time-of-Flight (TOF)-Messprinzip | |||
IO-Ausgabe | NPN oder PNP | |||
Arbeitsbereich | 0,05 m ~ 5 m | 0,05 m ~ 20 m | ||
Laserquelle | 905 nm (Klasse I) | |||
Öffnungswinkel | 270° | |||
Scanfrequenz | 15 Hz / 30 Hz | |||
Winkelauflösung | 0,1° / 0,3° | |||
Selbstlernfunktion | Automatisches Scannen der Umgebung und Generieren von Bereichen | |||
Elektrische Anschlüsse | Db15 Männlich / Scatter | |||
Versorgungsspannung | DC 9 V ~ 28 V | |||
Stromverbrauch | 2 W | |||
Weichenantrieb | DC 30 V 50 mA max. | |||
Schalenfarbe | Gelb | |||
Schutzart des Gehäuses | IP65 | |||
Gewicht | 150 g (Kabel nicht im Lieferumfang enthalten) | |||
Abmessungen (L × B × H) | 50 × 50 × 76 mm | |||
Erkennbare Objektform | Fast jede Form | |||
Messfehler | ±30 mm | |||
Anzahl der Feldsätze | 16 Felder, 3 gleichzeitige Schutzfelder (pro Feldsatz) | |||
Anschlussart | Micro-USB | |||
Eingang | GND/NC × 4 | |||
Schaltausgang | NPN × 3, Gerätebetriebsstatus; PNP × 3, Gerätebetriebsstatus | |||
Verzögerungszeit | 100 ms ~ 10.000 ms (konfigurierbar), typischer Wert 330 ms | |||
Ansprechzeit | 15 Hz: 67 ms ~ 29.949 ms (konfigurierbar), typischer Wert 134 ms; 30 Hz: 33 ms ~ 29.997 ms (konfigurierbar), typischer Wert 66 ms | |||
Statusanzeige | Statusanzeige × 1, Bereichsgruppenanzeige × 3 | |||
Vibrationsfestigkeit | 10 – 55 Hz, Amplitude 0,75 mm, XYZ dreiachsig, 2 Stunden pro Achse; 50 – 200 Hz, 196 m/s² (20G), Scangeschwindigkeit 2 Min./Zyklus, XYZ dreiachsig, 2 Stunden pro Achse; | |||
Umgebungstemperatur im Betrieb | -10 ℃ ~ +55 ℃ | |||
Lagertemperatur | -30 ℃ ~ +75 ℃ | |||
Umgebungslichtunempfindlichkeit | >15.000 Lux | |||