Untersuchung der Rolle von LiDAR in autonomen mobilen Robotern (AMRs)
- Teilen
- Herausgeber
- Zoe
- Ausgabezeit
- 2024/9/4
Zusammenfassung
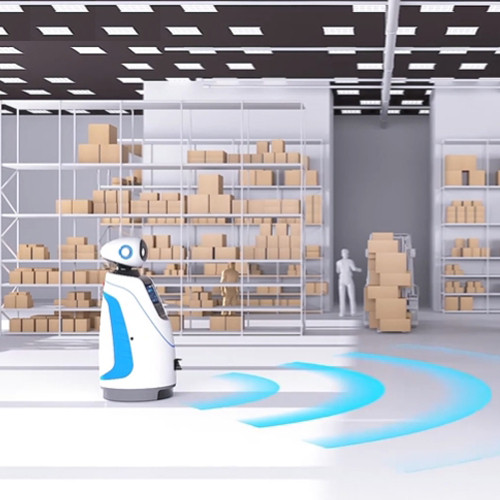
Dank ihrer autonomen Navigation und flexiblen Mobilität haben AMRs die Produktionseffizienz und die Intelligenz des Logistikmanagements in der industriellen Automatisierung und intelligenten Logistik deutlich verbessert. Als eine der Kernkomponenten von AMRs fungiert LiDAR als „Auge“ des Roboters. LiDAR ermöglicht nicht nur hochpräzise Positionierung und Navigation, sondern auch die Echtzeiterkennung und -identifizierung von Hindernissen und gewährleistet so zuverlässige Sicherheit bei der Hinde
Was ist 2D-TOF-LiDAR und wie funktioniert es in AMRs?
2D-TOF-LiDAR
2D-TOF-LiDAR (Two-Dimensional Time of Flight LiDAR) ist ein Laserradarsystem, das auf dem Time-of-Flight-Prinzip (TOF) basiert und für zweidimensionale Raummessungen eingesetzt wird. Es sendet einen Laserstrahl auf ein Ziel und misst die Zeit, die der Laserstrahl benötigt, um vom Ziel reflektiert und zurückgesendet zu werden (die Flugzeit). So lässt sich die Distanz zwischen Ziel und LiDAR präzise berechnen. Das reflektierte Signal liefert nach der Verarbeitung Entfernungsinformationen zum Ziel. Durch die Integration des Scanmechanismus des LiDAR (z. B. eines rotierenden Spiegels oder einer linearen Abtastung) kann das System zudem die Position des Ziels (den Azimut) in der zweidimensionalen Ebene bestimmen.
Autonome mobile Roboter (AMRs)
Bei Diskussionen über AMRs denken die Leute oft an ein anderes, verwandtes Konzept: AGVs.
AGV (Automated Guided Vehicle) ist ein Fahrzeugtyp, der sich automatisch entlang einer vordefinierten Route bewegt und typischerweise beim Transport von Objekten eingesetzt wird. AGVs folgen einer festgelegten Route. Wenn sie während der Fahrt auf ein Hindernis stoßen, halten sie an und warten, bis das Hindernis beseitigt ist, bevor sie die vorgegebene Route fortsetzen und die Transportaufgabe abschließen.
AMR steht für „Autonomous Mobile Robot“ und ermöglicht spurlose Fortbewegung durch autonome Navigation. Oftmals können AMRs mit Roboterarmen ausgestattet werden, um die Objekthandhabung zu verbessern. AMRs können ihren aktuellen Bewegungspfad in Echtzeit mit einer gespeicherten Karte vergleichen. Taucht während der Bewegung ein Hindernis auf, berechnet das System sofort die beste Route, um das Hindernis zu umgehen und den gewünschten Ort zu erreichen.
Gängige autonome Bewegungsmethoden für AMRs umfassen LiDAR-Navigation (LiDAR SLAM) und visuelle Navigation (Visual SLAM). Dieser Artikel konzentriert sich auf die LiDAR-Navigation für AMRs.
LD-05D 2D TOF LiDAR
Der LD-05D 2D TOF LiDAR von DADISICK verfügt über eine Selbstlernfunktion, mit der Benutzer den Arbeitsbereich über die Software „LD Designer“ festlegen können. Durch Drücken und Halten der „Selbstlern“-Taste für 3 Sekunden wechselt das Gerät in den Selbstlernmodus. In diesem Modus führt der 2D-LiDAR ein horizontales Laserscanning durch, um schnell die 2D-Konturinformationen der Umgebung des Roboters zu erfassen und anhand der gescannten Kontur die Grenzen des Arbeitsbereichs zu definieren.
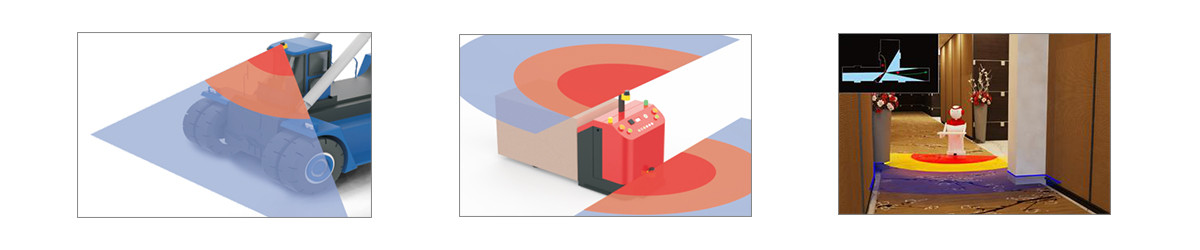
Schlüsselfunktionen von 2D-TOF-LiDAR in AMR-Systemen
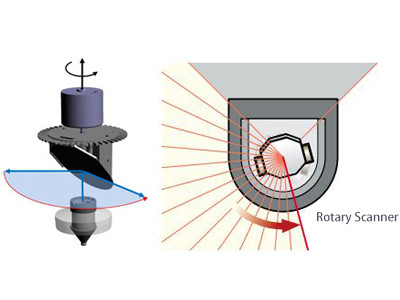
Radarscanning:
2D-LiDAR scannt die horizontale Ebene, indem es Laserstrahlen aussendet und die von umgebenden Objekten reflektierten Signale empfängt. Diese Signale werden verwendet, um die Entfernung und den Winkel (normalerweise den Azimut) zwischen den Objekten und dem Radar zu messen.
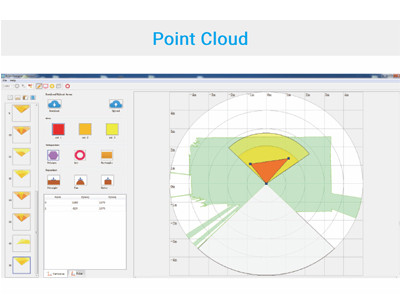
Punktwolkengenerierung:
Während des Scanvorgangs werden die vom Radar erfassten Datenpunkte (Entfernung und Winkel) in eine Punktwolke in einem 2D-Koordinatensystem umgewandelt. Diese Punktwolkendatenpunkte stellen die Positionen und Formen von Objekten innerhalb der Scanebene des Radars dar.
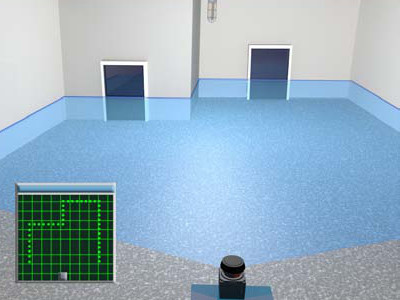
Kartenaufbau:
Basierend auf den Punktwolkendaten kann eine 2D-Karte der Umgebung erstellt werden. Diese Karte kann in Form einer Belegungsrasterkarte vorliegen, wobei jede Rasterzelle einen kleinen Bereich der Umgebung darstellt und basierend auf den Radardaten entweder als frei (schiffbar), belegt (versperrt) oder unbekannt gekennzeichnet ist.
Autonome Navigation
Für AMRs, die mit 2D-LiDAR ausgestattet sind, werden typischerweise Algorithmen verwendet, die für 2D-Umgebungen geeignet sind, wie z. B. Gmapping, Hector, Karto und Cartographer. Diese Algorithmen nutzen die von 2D-LiDAR bereitgestellten Daten für die Kartenerstellung und Roboterlokalisierung.
Während des SLAM-Prozesses nutzt der AMR die vom 2D-LiDAR erfassten Umgebungsdaten in Kombination mit SLAM-Algorithmen, um schrittweise eine 2D-Karte der Arbeitsumgebung zu erstellen. Diese Karte enthält nicht nur die Position von Hindernissen, sondern kann auch Wände, Korridore und andere Umgebungsmerkmale enthalten.
Mit der Ausgangskarte und Echtzeit-Umgebungsdaten kann der AMR mithilfe von SLAM-Algorithmen eine präzisere Lokalisierung erreichen. Basierend auf der erstellten Karte kann der AMR eine Pfadplanung durchführen und die optimale Route auswählen, um Hindernisse zu vermeiden und den Zielort zu erreichen.
Bei Umgebungsänderungen (z. B. dem Auftauchen neuer Hindernisse oder blockierter Wege) nutzt der AMR 2D-LiDAR-Daten und SLAM-Algorithmen, um die Karte zu aktualisieren und die Route neu zu planen. Durch diesen dynamischen Anpassungsmechanismus gewährleistet der AMR eine kontinuierliche und stabile autonome Navigation.
Überlegungen:
Da 2D-LiDAR nur horizontal scannt, kann es keine Informationen über die Höhe von Hindernissen liefern. Dies kann die Navigationsfähigkeiten des AMR in manchen Situationen einschränken, insbesondere wenn die Hindernishöhe die Passierbarkeit des Roboters erheblich beeinträchtigt. In vielen Bewegungsszenarien auf 2D-Ebene (z. B. in Innenräumen und flachen Außenbereichen) ist 2D-LiDAR jedoch für Kartierungs- und Navigationsanforderungen ausreichend.
2D-TOF-LiDAR-Integration mit anderen Sensoren und zukünftigen Trends
LiDAR kann auch mit anderen Sensoren wie Kameras und Ultraschallsensoren integriert werden, um die Gesamtleistung von AMRs zu verbessern. Beispielsweise können Ultraschallsensoren im Kollisionsvermeidungssystem eines AMR LiDAR ergänzen, indem sie die Fähigkeit des Roboters verbessern, Objekte mit geringer Reflektivität zu erkennen und sich an spezifische Umgebungsbedingungen anzupassen. Auch in Szenarien, die eine Nahbereichserkennung erfordern, wie etwa in Lücken zwischen Roboter und Regalen, können Ultraschallsensoren eine entscheidende Rolle spielen.
5 m Entfernung. Eine Technik, bei der mithilfe eines Laserstrahls Entfernungen gemessen und detaillierte Karten von Objekten und Umgebungen erstellt werden.

Erfassungsbereich 20 m. Eine Technik, die mithilfe eines Laserstrahls Entfernungen misst und detaillierte Karten von Objekten und Umgebungen erstellt.

Erfassungsbereich: 30–300 mm, 50–500 mm, 60–1000 mm Material: Kupfer vernickelt, Kunststoffbeschläge Anschlussart: 5-poliger M12-Stecker

Erfassungsbereich: 100-2000 mm, 200-4000 mm, 350-6000 mm Material: Kupfer vernickelt, Kunststoffbeschläge Anschlussart: 5-poliger M12-Stecker