Das Prinzip und die Anwendung des Einsatzes von Ultraschallsensoren in Roboterstaubsaugern
- Teilen
- Herausgeber
- Zoe
- Ausgabezeit
- 2024/8/17
Zusammenfassung
Das Prinzip und die Anwendung der Ultraschalltechnologie in Roboterstaubsaugern zur Teppicherkennung ähneln der A-Ultraschalldiagnose, bei der das Bodenmaterial anhand von Echos beurteilt wird. Im Vergleich zur KI-Zielerkennung ist die Ultraschalltechnologie nicht durch Bedingungen wie Beleuchtung und Farbe eingeschränkt.

Der Saugroboter 4.0 ist jetzt mit einem neuen Sensor ausgestattet – einem Ultraschallsensor, der das Problem der Erkennung zwischen Böden und Teppichen löst.
Was ist ein Ultraschallsensor?
Ein Ultraschallsensor ist ein Gerät, das Ultraschallsignale in andere Energiesignale (normalerweise elektrische Signale) umwandelt. Ultraschallwellen sind mechanische Wellen mit einer Schwingfrequenz über 20 kHz und einer Wellenlänge, die den Hörbereich des menschlichen Ohrs (20 Hz bis 20 kHz) überschreitet. Sie zeichnen sich durch hohe Frequenz, kurze Wellenlänge, minimale Beugung, besonders gute Richtwirkung und die Fähigkeit aus, sich wie Strahlen gerichtet auszubreiten. Im Alltag sind sie mit Ausnahme kohärenter Wellen nahezu störungsunempfindlich und stellen für den Menschen keine Gefahr dar.
Die Anwendungsmöglichkeiten in der Medizin, der Automobilindustrie, bei Drohnen und anderen Branchen sind sehr umfangreich.
Auch in Autos und Drohnen kommen Ultraschallsensoren häufig zum Einsatz.
Zum Beispiel Einparksensoren für die Rückwärtsfahrt.

Warum brauchen Staubsaugerroboter Ultraschallsensoren?
Ultraschallsensoren helfen Roboterstaubsaugern dabei, Teppiche zu „identifizieren“. Sobald der Roboterstaubsauger mit einem Ultraschallsensor ausgestattet ist, kann er die Art des Bodenmaterials bestimmen.
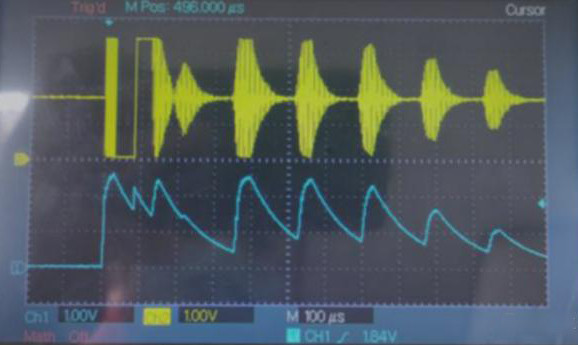
Beim Auftreffen auf einen glatten Boden werden die Ultraschallwellen aufgrund des Reflexionsmodus nur minimal vom Boden absorbiert und der Sensor erkennt ein kontinuierliches „Zurückprallen“ der Wellen.
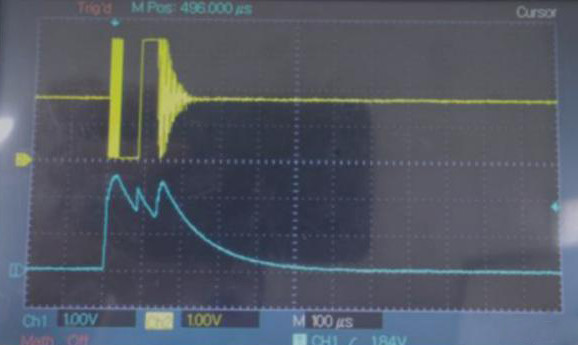
Trifft der Roboter jedoch auf einen Teppich mit Fasern, werden die Ultraschallwellen im nicht reflektierenden Modus von Materialien mit starken Schallabsorptionseigenschaften wie Filz, Wolle, Baumwolle oder Schaumstoff absorbiert. Der Saugroboter empfängt in diesem Fall kein Echo und erkennt, dass er sich einem Teppich nähert.
Warum sollte man die Ultraschallerkennung den fortschrittlichsten KI-Objekterkennungsalgorithmen vorziehen?
Wenn die KI-Objekterkennung auf „Sehen“ beruht, funktionieren Ultraschallsensoren eher wie eine „Berührungserkennung“.
Die tatsächliche Wirksamkeit der KI-Objekterkennung hängt von vielen Faktoren ab, wie z. B. Beleuchtung, Teppichfarbe, Erkennungswinkel, Echtzeit-Verarbeitungsgeschwindigkeit und Kameraauflösung.
Beispielsweise besteht bei schlechten Lichtverhältnissen und dunklen Teppichen die Gefahr, dass KI den Teppich fälschlicherweise als Boden erkennt. Aufgrund des Funktionsprinzips von Ultraschallsensoren werden sie jedoch von diesen Faktoren nicht beeinflusst, sodass solche Fehleinschätzungen vermieden werden.
Empfohlene Ultraschallsensoren

Erfassungsbereich: 20–120 mm Erfassungsbereich: 20–200 mm Material: Kupfer vernickelt Anschlussart: 4-poliger M12-Stecker

Erfassungsbereich: 100-2000 mm, 200-4000 mm, 350-6000 mm Material: Kupfer vernickelt, Kunststoffbeschläge Anschlussart: 5-poliger M12-Stecker

Erfassungsbereich: 30–300 mm, 50–500 mm, 60–1000 mm Material: Kupfer vernickelt, Kunststoffbeschläge Anschlussart: 5-poliger M12-Stecker

Erfassungsbereich: 100–2000 mm, 150–3000 mm Material: Kunststoffzubehör, mit Epoxidharz verfüllt Anschlussart: 5-poliger M12-Stecker